End of Arm Tooling
Connor Sequeira
Addressing the Breakage of the Existing Design
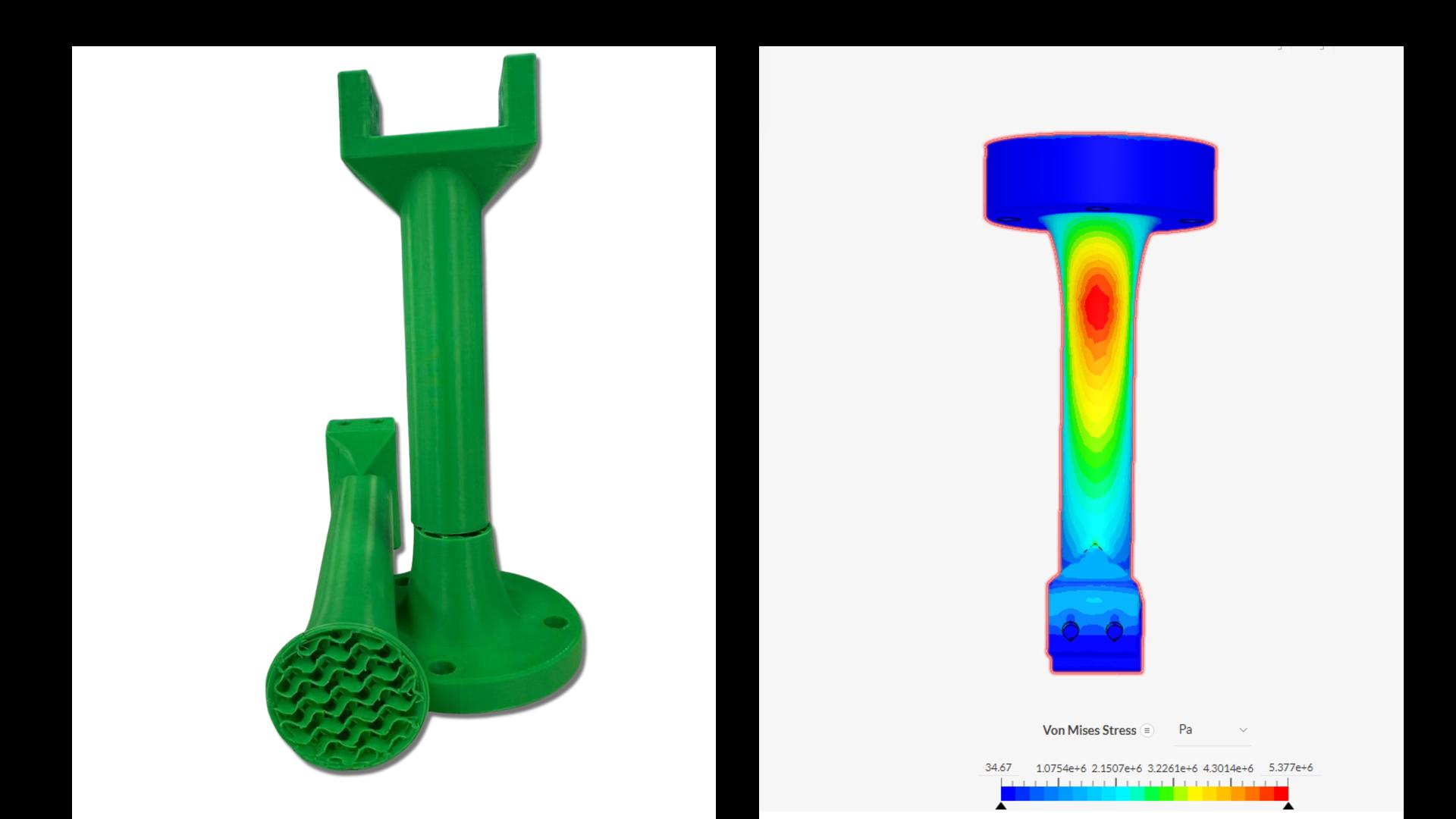
The goal of this project was to address the breakage of the original tooling design and create a more durable solution. Using FEA software (SimScale), the structural integrity of the original design was assessed to identify weaknesses, leading to a stronger and more reliable tooling solution that could withstand the demands of the pneumatic activated magnetic gripper and movement of the robotic arm it would mount to
Designing for Strength and Magnetism Adjustment
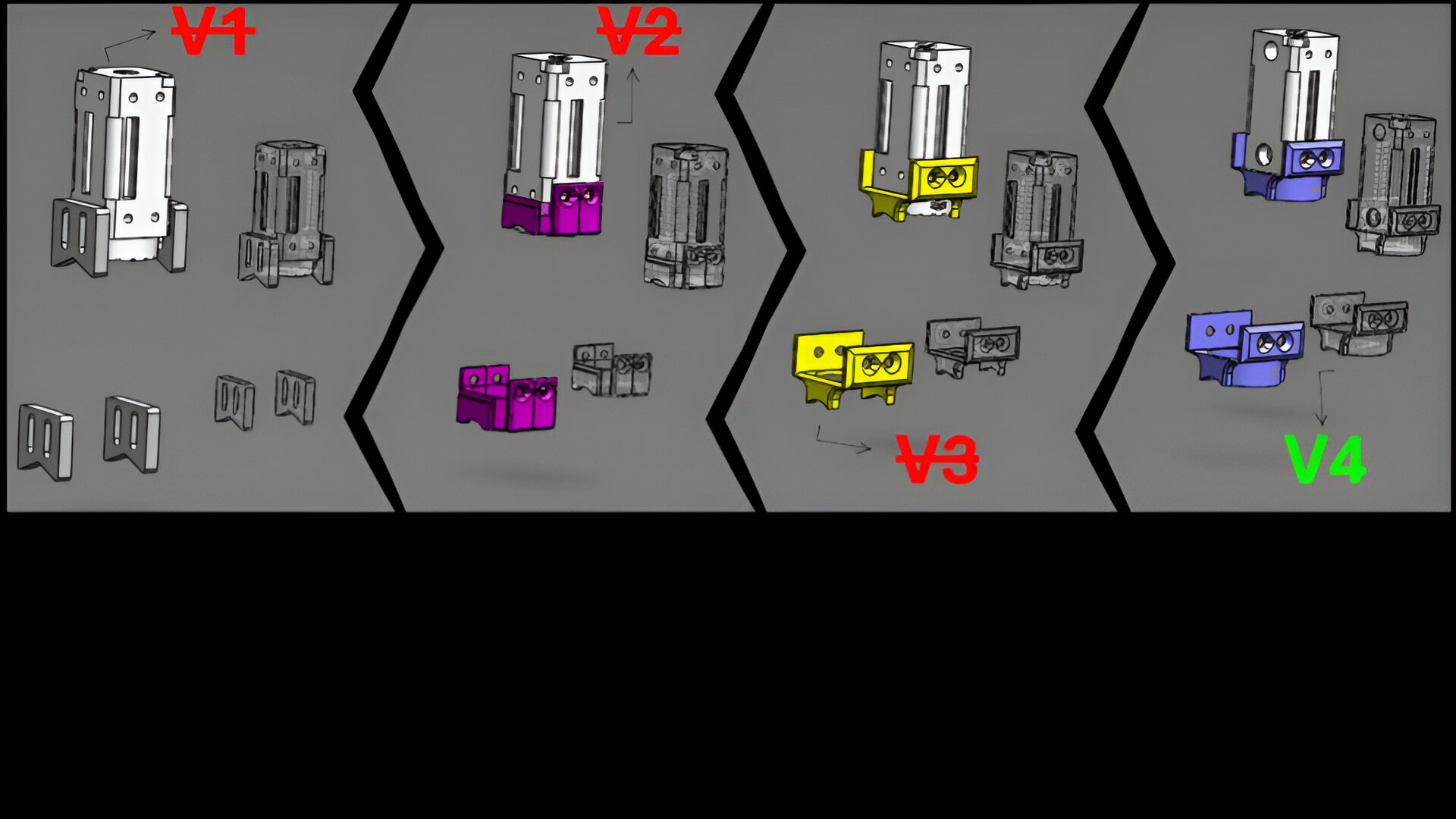
The gripper endpiece designs were optimized to improve grip strength and magnetism by adjusting the magnet's distance and material selection. The design iterations focused on enhancing magnet performance and ensuring the gripper's functionality met production needs. Additionally, the designs were optimized for 3D printing, ensuring quick, durable, and support-free manufacturing with streamlined shapes and reinforced sections to prevent breakage and maintain strength in high-demand environments.
.png)
Improved Durability, Faster Production, and Less Down Time
The final tooling design proved to be much more robust and efficient than the original. By using a lofted boss, the new design printed faster and was significantly more durable. The original tooling would break after just two hours of use, but the new design has experienced zero failures after extensive testing. FEA simulations confirmed the improvements in the design's structural integrity, and the updated tooling now better meets the needs of the system, offering both reliability and longevity in production.