Automated Lathe
Connor Sequeira
This project was completed through a collaborative effort, with each team member contributing to various aspects of design, programming, and testing.
.JPG)
Enhancing System Efficiency and Reliability
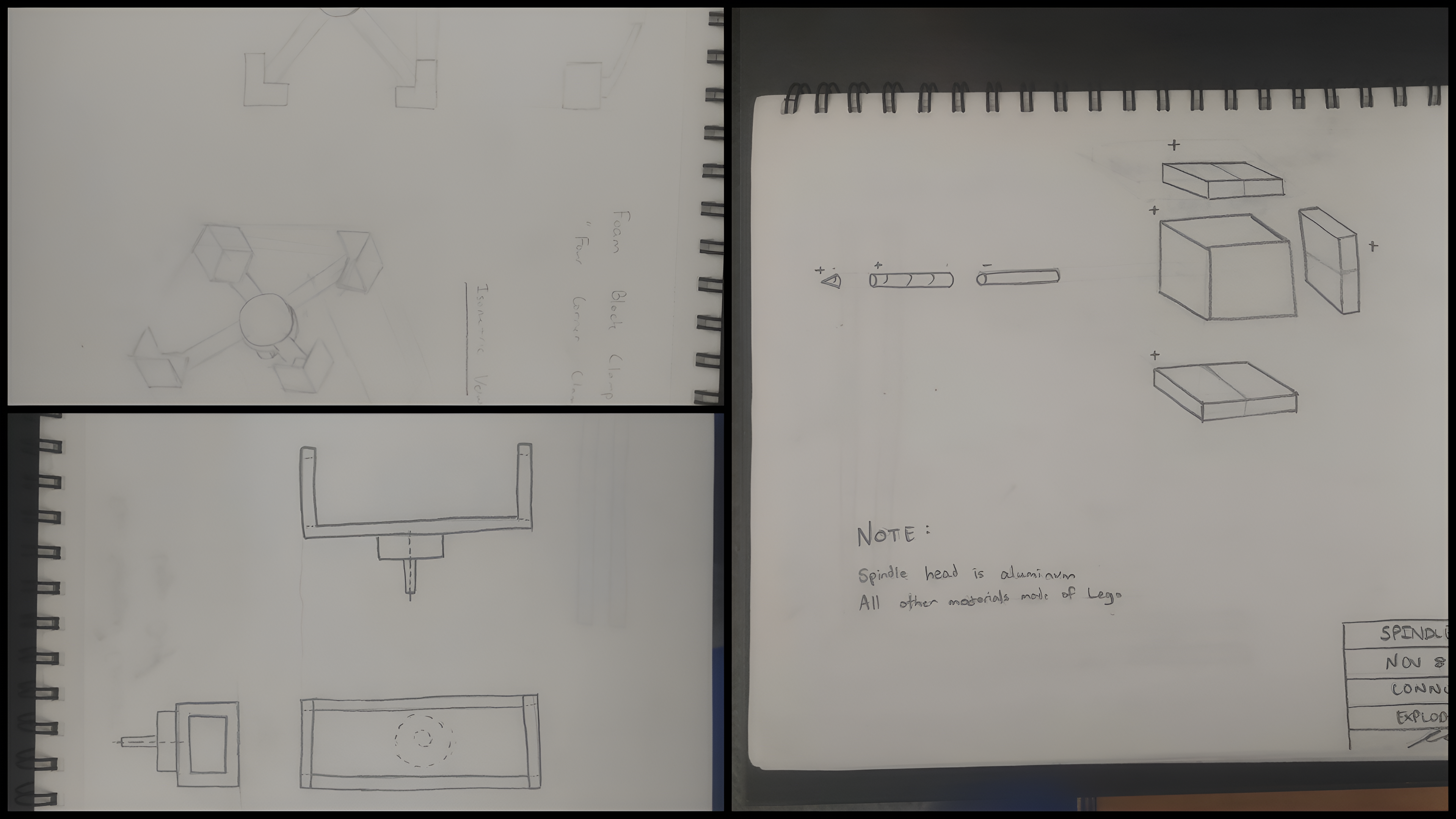
The primary goal of this project was to design and build an automated lathe capable of carving custom user profiles on foam blocks. Using a LEGO EV3 brick and a rack-and-pinion system, the lathe was intended to precisely control movement along the X and Y axes while rotating the block. The system needed to execute a repeated "cut-and-turn" process followed by a full pass on each rotation to ensure accurate carving of user-defined profiles.
Another key objective was to develop a reliable control system to automate the lathe’s operations. A profile tracking algorithm, coded in RobotC, was implemented to guide the cutting process based on the user input profile. The control algorithm had to ensure smooth coordination between the foam block’s rotation and the lathe’s movement across the rack-and-pinion system, maintaining precision throughout the operation.
Building and Refining the Mechanical and Control Systems
The prototyping phase involved constructing the rack-and-pinion system to handle precise X and Y movements of the lathe, ensuring smooth operation and reliable positioning during carving. The motors driving the foam block were tested for consistent speed and stability to maintain even rotation. Several design iterations focused on mounting the cutting tool in a way that allowed accurate contact with the foam surface. Additionally, multiple tests of the profile tracking algorithm were conducted, refining its accuracy to achieve precise cuts and stable performance. The final design delivered smooth, repeatable results with minimal deviation from the input profile.