3D Vision Pick n Place
Connor Sequeira
Enhancing System Efficiency and Reliability
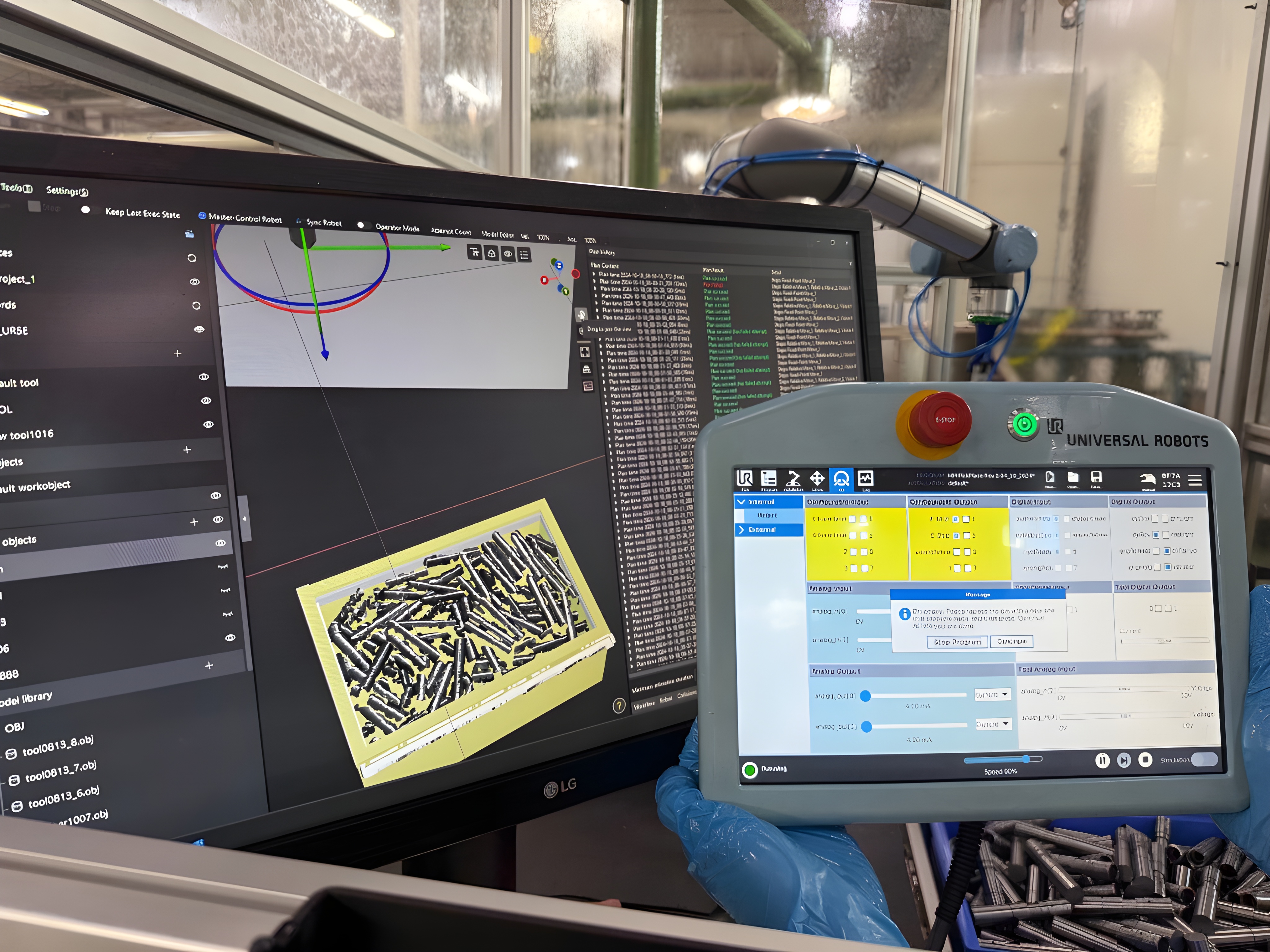
The primary goal of this project was to optimize a pick-and-place system using a Mech-Mind 3D vision camera and a UR5e robot for loading parts into a Hydromat machine. This included reducing the original cycle time of 21.3 seconds by improving robot motion, streamlining code logic, and synchronizing subsystems such as the camera, pneumatic pusher, and Hydromat signals.
The project also focused on minimizing downtime caused by mispicks and sunlight interference. By integrating a deep learning model to improve part recognition, the system became more reliable, with fewer errors and delays. Comprehensive user manuals ensured operators could easily manage the improved system, making it scalable and practical for industrial use.
.jpg)
Improving Recognition with Mech DLK Software
The Mech DLK software was used to train the AI model using labeled 2D images collected from the camera. This model was integrated with the system's 3D point process, combining the strengths of 2D image recognition and 3D vision for enhanced part identification. The upgrade significantly boosted the robot's part recognition confidence from 60% to 90%, leading to more reliable and accurate operations. This pairing of advanced machine learning and vision processing was pivotal in reducing errors and improving system performance.